案例中工件介绍:
液压升降柱


焊接特点:
- 工装定位精度差,重复示教编程繁琐
- 焊接高度小于6mm,不能使用接触寻位
- 圆形焊缝姿态实时变化,对机器人TCP精度要求高
项目需求:
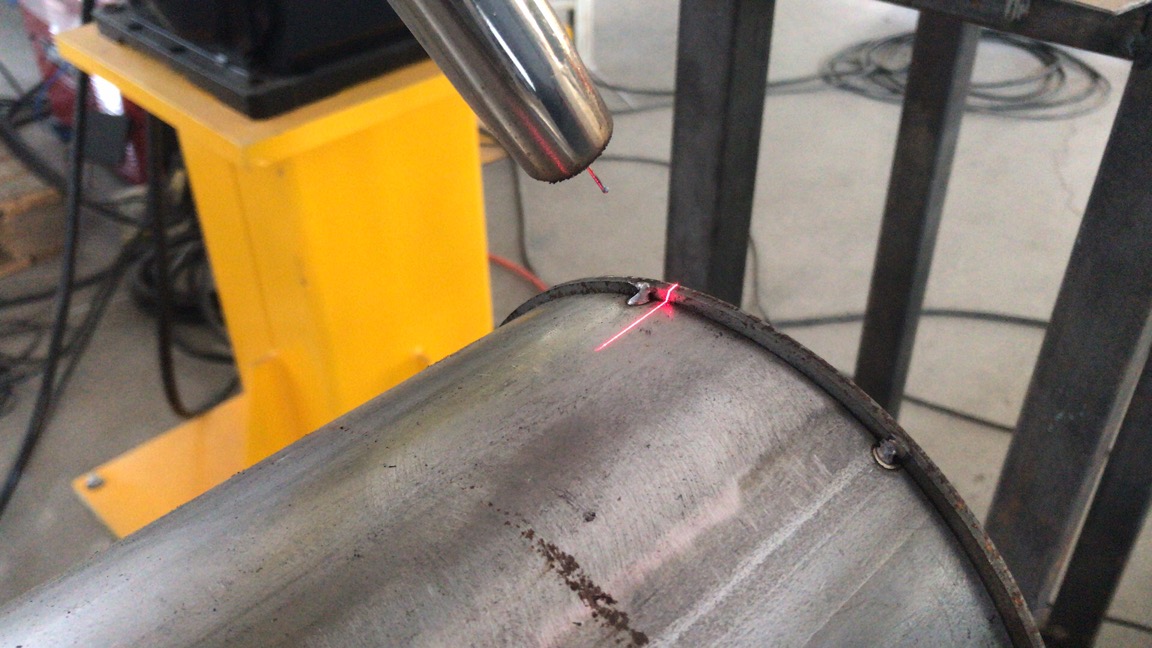
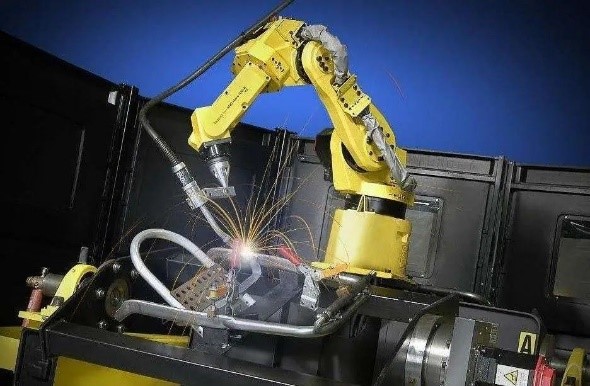
针对环缝焊接需求,苏州全视基于3D传感器搭配发那科焊接机器人与外部轴协同,通过线激光精确识别焊缝位置,纠正工件放置误差,完美实现环缝协同焊接,
极高效的解决了重复编程所带来的不便,减小了操作工人工作量,实现一键自动化焊接流程。(焊缝跟踪、焊缝引导、焊缝检测、激光寻位、焊缝寻位、跟踪寻位、焊缝纠偏、激光视觉)
功能优点:
- 线激光精确识别焊缝位置,实现工件定位,工装精度要求低
- 编程简单好学,易上手
- 一次编程,实现一键焊接自动化
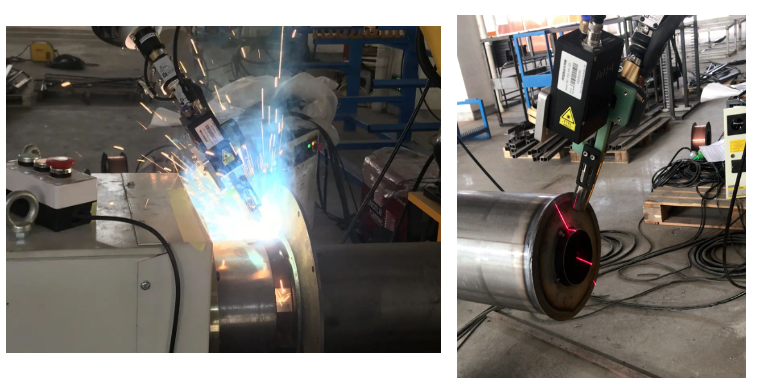
- 协同焊接,机器人姿态变化小,焊道成形好

视频展示:
全视焊缝跟踪系统应用于液压升降柱跟踪寻位(点击文字可观看视频)
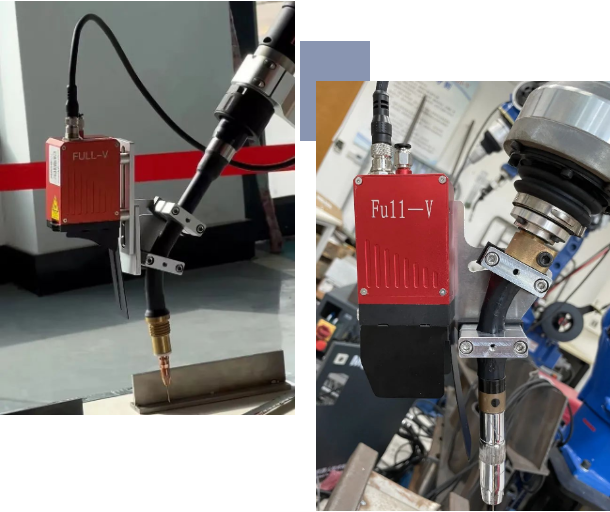
本案例使用苏州全视智能光电FV-160传感器,体积小、对工件干涉小、内置风冷风刀设计,可以保证设备长时间稳定工作。(焊缝跟踪、焊缝引导、焊缝检测、激光寻位、焊缝寻位、跟踪寻位、焊缝纠偏、激光视觉)
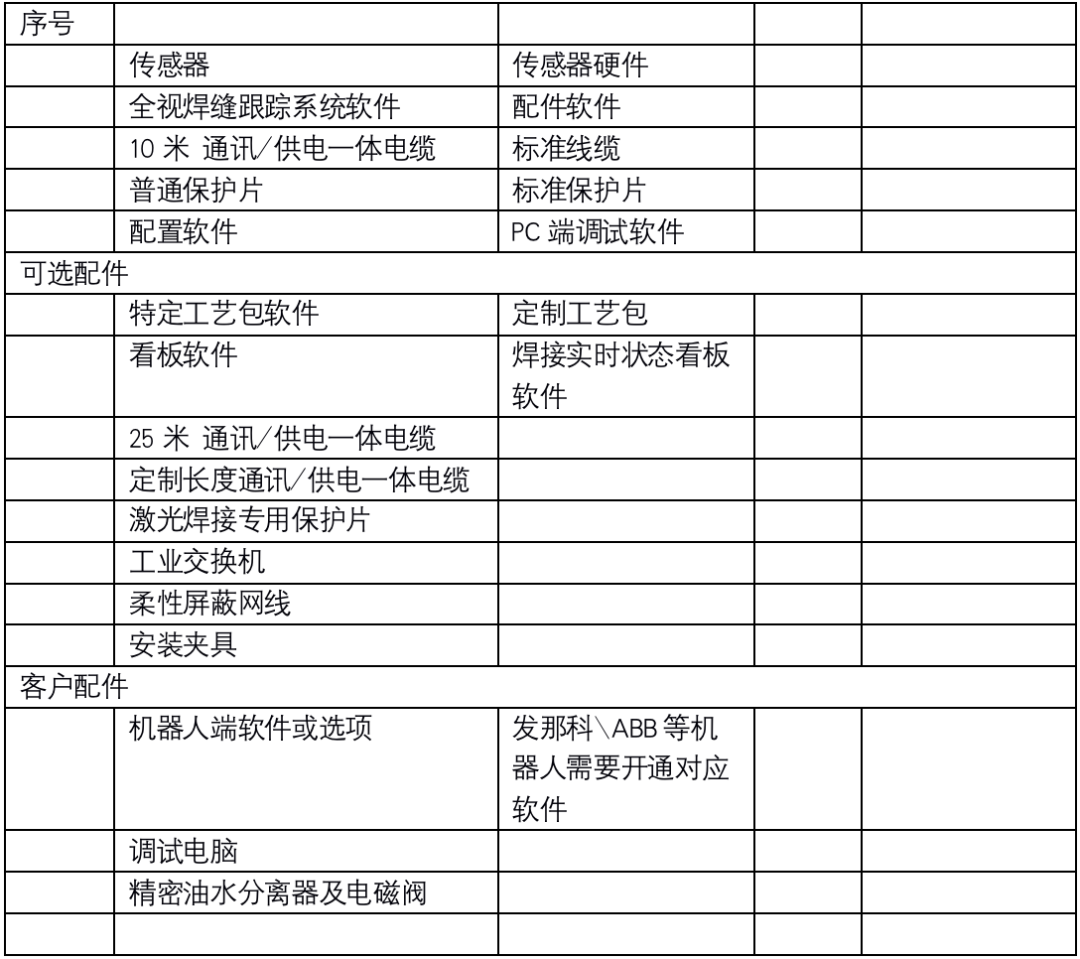
传感器详情:
FV-160小型化系列焊缝跟踪系统,针对MIG焊接工艺的工件大、干涉多、坡口大、偏差大等特点,而设计的一套激光传感器和配套的软件系统。

传感器特点
高分辨率系列焊缝跟踪系统
高分辨率,最高分辨率可达0.08mm
视场大,最高达到100mmX130mm检测范围。
检测速度高,标准型号20Hz~50Hz,可以满足2米/S的高速焊接跟踪需求
寻位、跟踪、先扫描后焊接等多种工作模式
支持40余品牌专机和机器人系统
安装高度高,达大160mm安装高度,减少不必须干涉
内置风冷系统,可以长时间稳定工作
内置风刀系统,延长保护玻璃寿命,减少烟雾干扰
内置控制器,系统简洁可靠
内置16~128GB内存空间,可对质量进行记录回溯
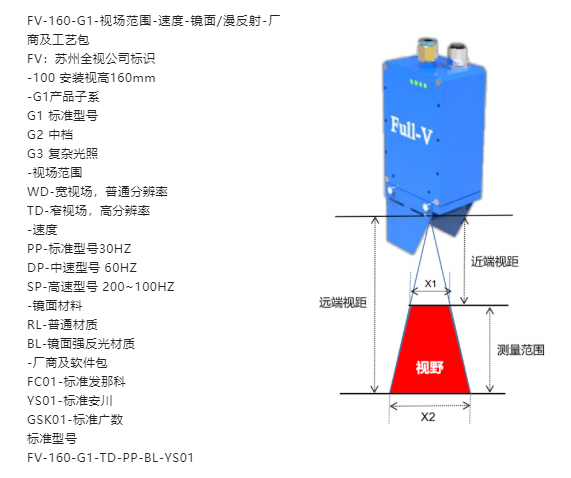
传感器型号

合作厂商介绍
FANUC 拥有近 60 年的计算机数控设备开发经验,全球安装的产品超过 2890 万件,员工人数超过 8200 人,是全球领先的工厂自动化制造商之一。
作为业内唯一一家自行开发和制造所有主要组件的公司,FANUC 产品拥有卓越的质量和功能可靠性以及最高水平的可用性。100% FANUC 可实现 100% 的生产力和 99.99% 的可靠性。
苏州全视