案例中工件介绍
工程机械配件

一、焊接特点
工件个体较大,结构复杂,容易存在较大误差
焊缝一致性差,焊缝坡口存在不一致情况,完工后的焊缝质量难以保证
二、项目需求
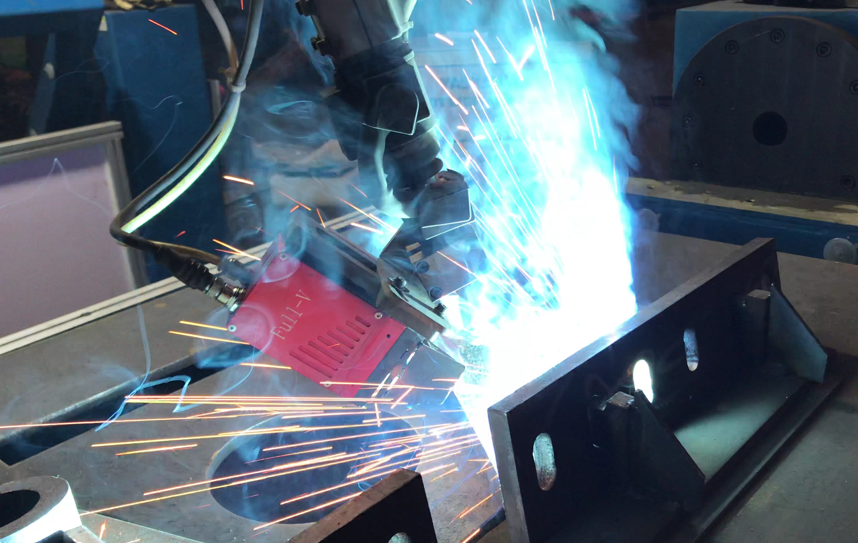
工程机械的受力组件,要求焊接强度高,熔深大,焊缝余高高,需要多层多套

三、功能优点
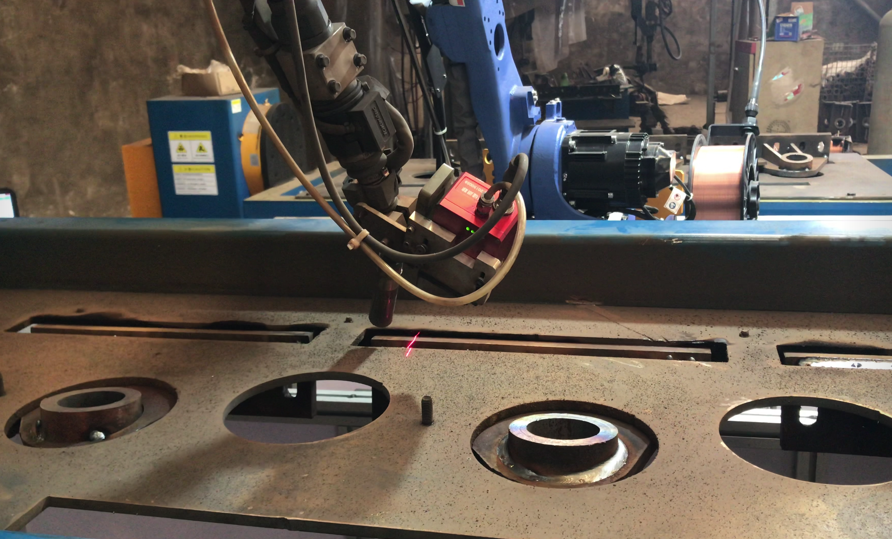
工件偏差大,组对误差大,通过激光寻位,纠正工件摆放误差和组对误差
苏州全视加装特有的激光传感器配合安川机器人的多层多道工艺包,实现高品质的厚板焊接
四、视频展示
应用案例 | 全视焊缝跟踪系统应用于工程机械寻位(点击链接可观看视频)
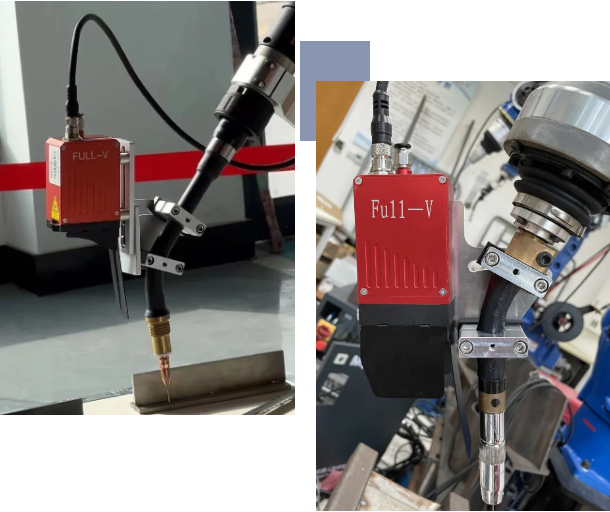
本案例使用苏州全视智能光电FV-160-WD传感器,体积小、工作距离高、对工件干涉小、精度高、内置风冷风刀设计,可以保证设备长时间稳定工作。(焊缝跟踪、焊缝引导、焊缝检测、激光寻位、焊缝寻位、跟踪寻位、焊缝纠偏、激光视觉)
五、传感器详情
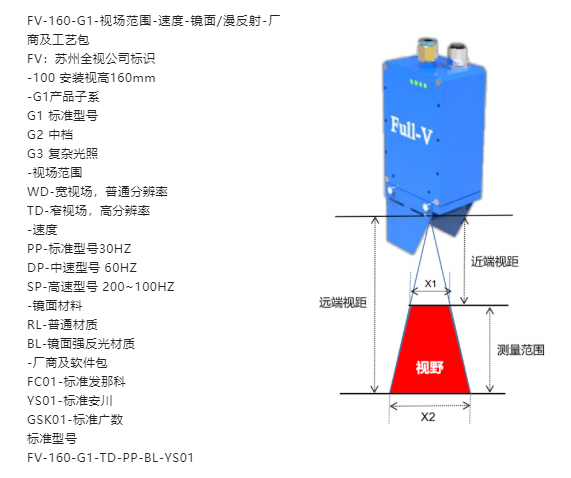
FV-160小型化系列焊缝跟踪系统,针对MIG焊接工艺的工件大、干涉多、坡口大、偏差大等特点,而设计的一套激光传感器和配套的软件系统。

传感器特点
高分辨率系列焊缝跟踪系统
高分辨率,最高分辨率可达0.08mm
视场大,最高达到100mmX130mm检测范围。
检测速度高,标准型号20Hz~50Hz,可以满足2米/S的高速焊接跟踪需求
寻位、跟踪、先扫描后焊接等多种工作模式
支持40余品牌专机和机器人系统
安装高度高,达到160mm安装高度,减少不必须干涉
内置风冷系统,可以长时间稳定工作
内置风刀系统,延长保护玻璃寿命,减少烟雾干扰
内置控制器,系统简洁可靠
内置16~128GB内存空间,可对质量进行记录回溯
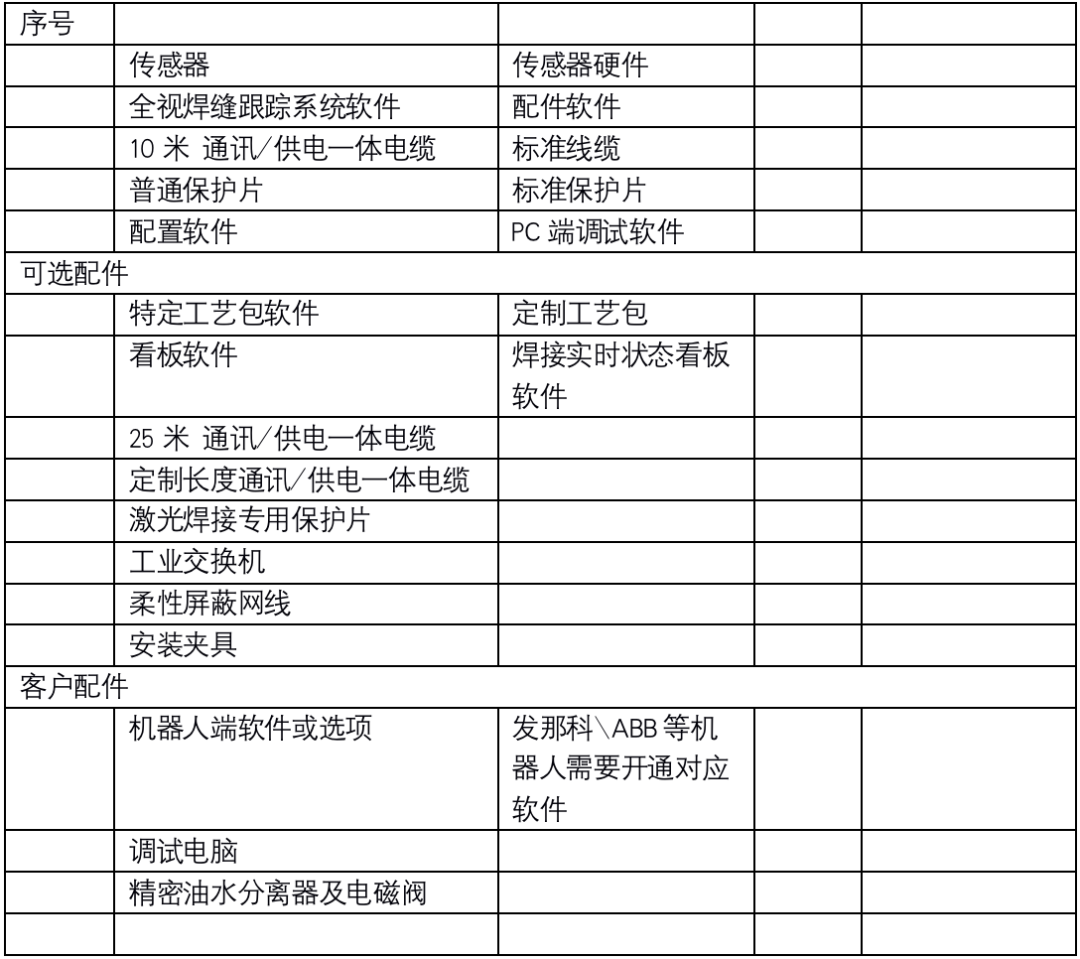
传感器型号

六、合作厂商介绍
安川电机是全球市占率最高的工业用机器人公司之一,负责制造运动控制器、伺服驱动器、变频器、工业机器人,创立于1915年,总公司在福冈县的北九州市。
安川电机于 1977 年推出日本第一台全电动工业机器人,目前有超过 270 万台工业机器人在全球范围内运行,作为在工厂和其他日常生活中很少见到的地方生产汽车、家用电器、PC、智能手机和其他产品的不可或缺的设备。

七、苏州全视
苏州全视智能光电有限公司(Full-V)成立于2017年,位于江苏省苏州市工业园区,在北京、山东设有分公司,华南和西南设有办事机构。公司主要以3D激光焊缝跟踪传感器为核心,为客户提供传感、机器人行业解决方案以及焊接专机系统整套方案。
公司主营产品为各式近距离、中距离、中远距离、远距离、点激光、运动控制器系列传感器以及各行各业定制化焊接解决方案,满足客户各种焊接需求。(焊缝跟踪、焊缝引导、焊缝检测、激光寻位、焊缝寻位、跟踪寻位、焊缝纠偏、激光视觉)
公司在光学、电子硬件、算法、系统等领域大量创新,截至目前,在相关领域已经申请软件著作权48项、专利17项,其中发明专利授权1项、实用新型专利授权4项、软件产品认证1项。获得“江苏省民营科技企业”、“苏州高新技术企业培育入库”、“苏州工业园区第十四届科技领军人才项目”、“国家高新技术企业”等多项资格。(焊缝跟踪、焊缝引导、焊缝检测、激光寻位、焊缝寻位、跟踪寻位、焊缝纠偏、激光视觉)
苏州全视以服务客户,共同实现100%项目交付为理念,光电传感器国产化替代为自身定位,期望让机器人标配激光的眼睛!