案例中工件介绍:旋耕机外壳

一、焊接特点:
- 折弯、组对精度差
- 对焊接精度要求高
- 焊缝多,重复示教编程繁琐

二、项目需求:
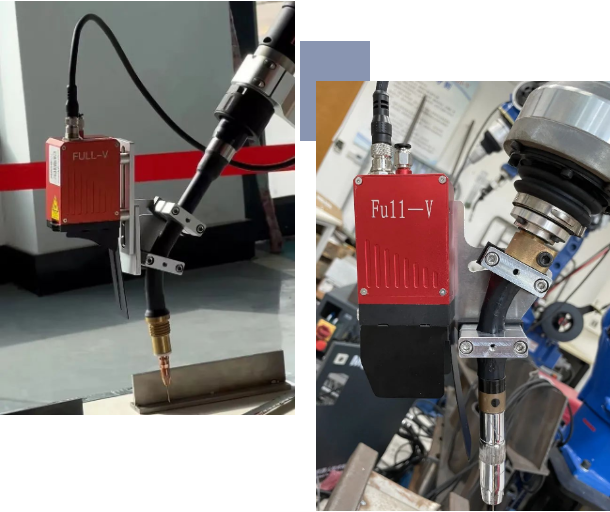
针对农机外壳焊接需求,苏州全视基于3D传感器搭配焊接机器人,通过线激光精确识别焊缝位置,纠正工件折弯、组对误差,配合焊接工艺,实现提升焊接质量、美化焊接外观。


三、功能优点:
- 实现一键焊接自动化,大幅度提高生产效率
- 线激光精准识别焊缝位置,实现补偿折弯工艺缺陷
- 同一类型工件仅需编程一次,简化工厂示教编程工作量

四、视频展示:
应用案例|全视焊缝跟踪系统应用于旋耕机外壳(点击文字可观看视频)
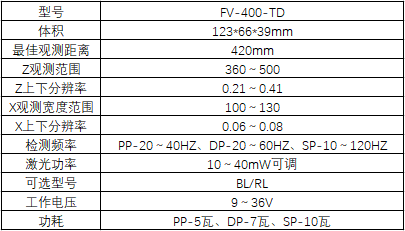
五、传感器详情:
FV-400小型化系列焊缝跟踪系统,针对寻位或焊接、免编程、要求焊接精度高等要求而设计的一套激光传感器和配套的软件系统。焊缝跟踪、焊缝引导、焊缝检测、焊缝纠偏、激光焊接、激光视觉、激光寻位、焊缝寻位、跟踪寻位、自动化焊接、焊缝跟踪传感器
- 高分辨率系列焊缝跟踪系统
- 高分辨率,最高分辨率可达0.08mm
- 检测速度高,扫描频率高于120HZ,可以满足高速焊接跟踪需求
- 寻位、跟踪、先扫描后焊接等多种工作模式
- 支持40余品牌专机和机器人系统
- 安装高度高,达到400mm安装高度,减少不必须干涉
- 内置风冷系统,可以长时间稳定工作
- 内置风刀系统,延长保护玻璃寿命,减少烟雾干扰
- 内置控制器,系统简洁可靠
- 内置16~128GB内存空间,可对质量进行记录回溯
关于全视: