案例工件介绍
钢筋笼大量应用于隧洞管片、桥梁、建筑、桩基等混凝土预埋件中,对混凝土起到约束的作用,使之能承受一定的轴向拉力。

一、焊接特点
- 需要进行焊接后预埋,焊接工件量大
- 自动化焊接难度大
- 焊接良率低,使用复杂

二、项目需求
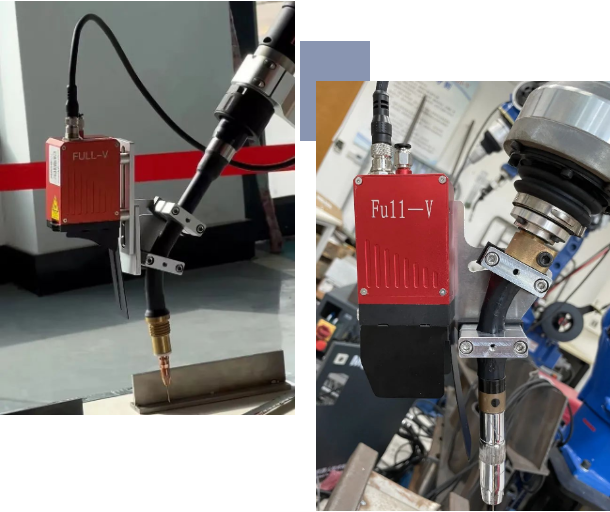
针对钢筋笼焊接特点,苏州全视基于3D传感器开发了钢筋笼焊接自动定位系统。
加装全视激光传感器及配套的钢筋自动识别工艺包,通过自动扫描并识别多种钢筋连接方式,解决钢筋误差,自动计算焊接点位或路径,解决焊接位置变位,自动判断钢筋可焊接性,解决缝隙过大焊接。
解决问题:
- 自动扫描,解决钢筋误差
- 自动识别,解决焊接位置变位
- 自动判定,解决缝隙过大焊接
- 简单编程,编程简化,快速投入使用

三、功能优点
- 编程简单方便,指令简化,不需要精确对点
- 扫描速度不低于6米/分,对焊接节拍影响小
- 不受环境光、焊接弧光干扰,稳定可靠
- 自动判断钢筋间隙自动,跳过不可焊接点位
- 提供MES系统接口,可以实现焊接工艺,焊接效率的监控
- 提供4G/5G远程服务,偏远地址远程升级算法,提高生产效率

四、视频展示
本案例使用苏州全视智能光电FV-400传感器,体积小、适配性强、工作范围大、精度高、内置风冷风刀设计,可以保证设备长时间稳定工作。(焊缝跟踪、焊缝引导、焊缝检测、激光寻位、焊缝寻位、跟踪寻位、焊缝纠偏、激光视觉)
五、适用产品范围
钢筋支持类型:圆钢/螺纹钢
支持直径范围:5~70mm
支持叠放类型:十字,水平,垂直,对接,端头等,可定制类型
最大扫描速度:3.6~6米/分钟
支持焊接方式:点焊/三点拉焊/多点摆动
支持层数:无遮挡下三层
光环境要求:不受环境光和相邻弧光干扰
六、系统构成
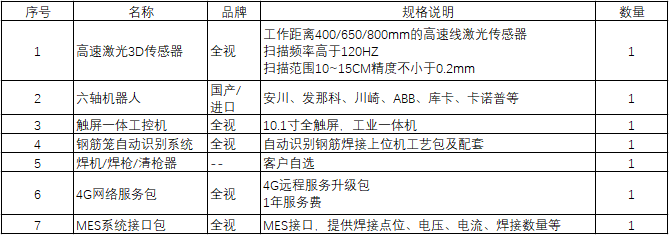

传感器详情
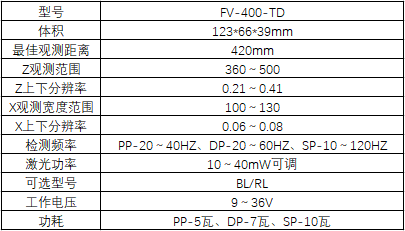
FV-400系列焊是针对寻位或焊接、免编程、要求焊接精度高等要求而设计的一套激光传感器以及配套的软件系统。
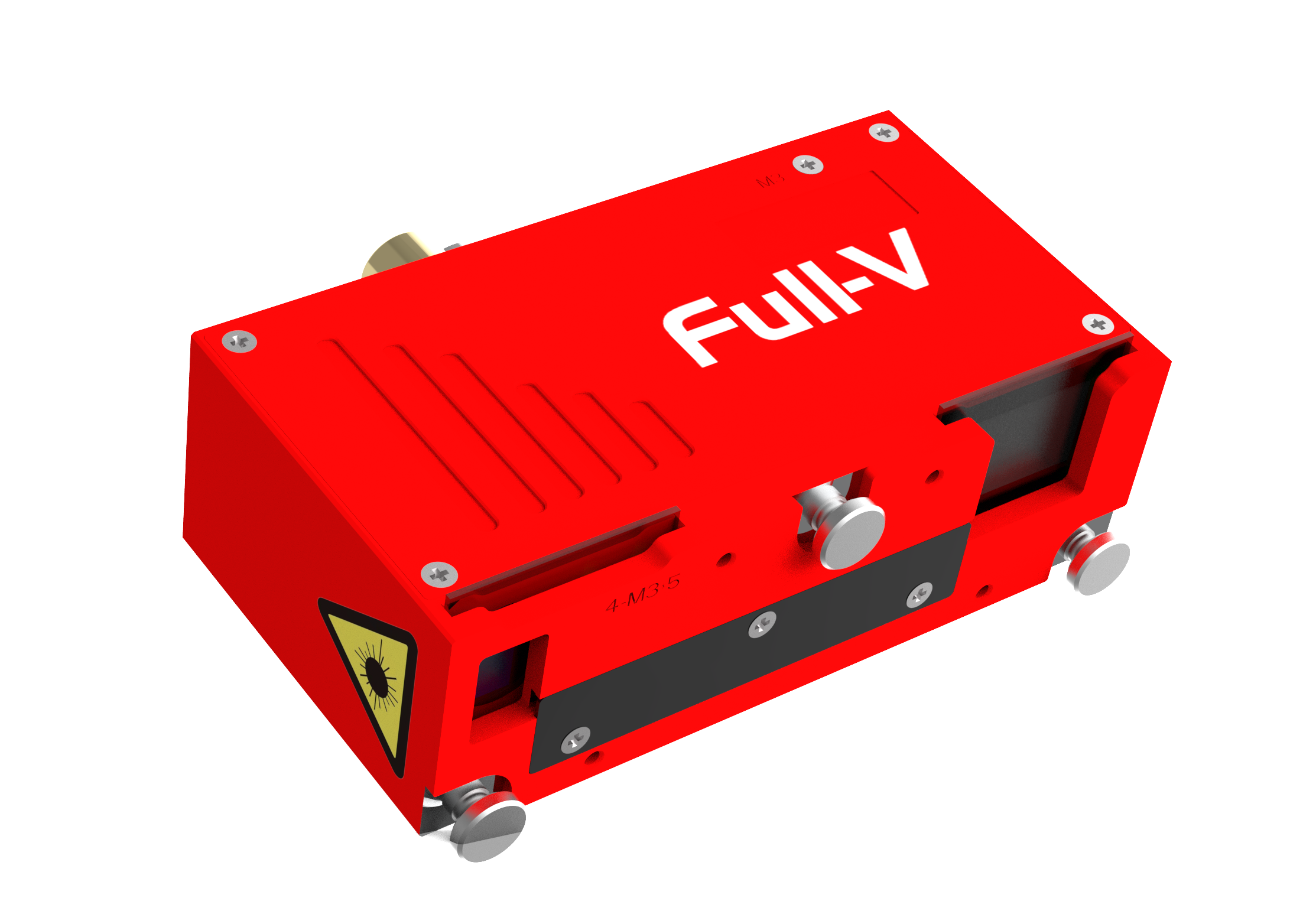
传感器特点
- 高分辨率系列焊缝跟踪系统
- 高分辨率,最高分辨率可达0.08mm
- 视场大,最高达到100mmX130mm检测范围。
- 检测速度高,扫描频率高于120HZ,可以满足2米/秒以上的高速焊接跟踪需求
- 寻位、跟踪、先扫描后焊接等多种工作模式
- 支持40余品牌专机和机器人系统
- 安装高度高,达到160mm安装高度,减少不必须干涉
- 内置风冷系统,可以长时间稳定工作
- 内置风刀系统,延长保护玻璃寿命,减少烟雾干扰
- 内置控制器,系统简洁可靠
- 内置16~128GB内存空间,可对质量进行记录回溯
传感器型号
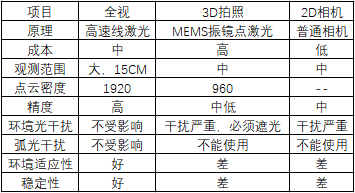
方案对比
七、合作厂商介绍

八、全视公司介绍